林震寰
(华设设计集团股份有限公司,江苏 南京 210000)
我国公路桥梁正处于建设与维护并重时期。钢结构桥梁由于自身材料特性、桥梁所处环境以及国内桥梁维护体系尚不完善等原因,导致钢结构桥梁结构易发生腐蚀与疲劳损伤。为应对未来钢结构桥梁维护需求的快速增长,保证桥梁的行车安全,研究出可以替代人工检测的方法,实现更标准、更准确的桥梁健康状况评估,成为当前桥梁维护工作的一个主要难点。本文根据国内外的研究,介绍无人机桥梁检测技术的组成与技术原理,探讨无人机桥梁检测的优缺点及改进方法,为无人机检测技术在桥梁维护中的应用提供参考。
无人机桥梁检测系统大致可以包括:无人机飞行平台、飞行控制系统、影像拍摄及显示系统和多功能控制终端。整个系统中,无人机飞行平台与影像拍摄及显示系统,构成桥梁劣化信息采集工具。根据构型不同,飞行平台可分为:固定翼无人机、旋翼无人机、无人飞艇、伞翼无人机等。其中,旋翼无人机操作简单、飞行稳定且对场地要求低,被广泛运用于桥梁检测系统的设计中。影像拍摄及显示系统由三轴增稳云台、高清相机、图像传输系统和显示器组成。三轴增稳云台和高清摄像机安装于桥梁检测无人机的上方,检测时飞手通过飞行控制系统控制无人机完成飞行、避障并触发高清摄像机的拍照与摄像功能等任务。检测人员可通过多功能控制终端实时观察桥梁健康情况,方便检测人员分析、诊断和量化病害程度,并且还可以通过终端记录病害信息,为桥梁健康最终评估提供依据。
无人机通过飞行控制系统控制或预先设定的飞行航线,拍摄记录得到大量的桥梁照片进行桥梁的健康评估。然而,由于高清摄像机受到户外拍摄环境的干扰,导致采集到的图像出现光照不均、灰度集中病害与背景对比度不足,噪声污染,图像细节不清晰,清晰度低等问题[1]。为快速、准确地对桥梁健康状况进行评价,需要采用数字图像处理技术,对照片进行进一步处理提取裂缝、腐蚀与油漆脱落等病害信息。但是,无人机在对桥梁进行检测时会产生大量图片,大多数检测人员没有足够的图像处理和分析能力,无法通过图像处理软件快速地处理大批量的桥梁损伤图片。
目前,对图像处理方法主要可以分类为基于颜色信息、特征信息两种方法。这两种方法主要是根据裂纹、腐蚀等损伤部分与健康桥梁表面的颜色以及形状特征的不同,对损伤进行分类使之能够实现损伤的自动识别[2,3]。近年来,随着计算机人工智能技术的发展,基于无人机视觉缺陷自动识别识别系统被陆续开发,该技术在图像处理技术的基础上,构造人工神经网络并利用筛选出来的桥梁病害信息对机器进行训练,使图像采集装置实现损伤的自动识别、分类与信息传送。我国学者提出了一种改进的融合卷积神经网络体系结构,用于识别在复杂干扰背景下钢箱梁的裂纹,裂纹识别精度可达95.38%[4]。韩国学者开发了一套图像捕捉和地理标记(ICGT)系统,该系统将GPS、IMU和激光雷达与安装在无人机上的摄像头同步,生成桥梁的地理参考图像并使用深度卷积神经网络进行实时、自动地损伤检测和定位,并通过图像拼接将提取的损伤投影到全景损伤图中[5]。
3.1 传统的桥梁检测方法
传统的桥梁检测主要是通过目视及手动检测,将检测人员送到被观测目标前,通过人眼以及其他辅助设备进行检查,获取结构劣化的关键信息以便后续分析和诊断,如图1。

图1 人工桥梁检测
然而,不同检测人员目视检查受到主观与客观等因素的影响导致检查结果存在差异,无法准确评估结构健康状况。同时,维护期间使用的大型桥下装置、大型卡车、特殊升降平台等大型设备会干扰桥梁的正常运营,因此传统的桥梁检测技术无法作为日常的检测手段应用于桥梁的维护中。
3.2 无人机桥梁检测实际应用的优势
随着无人机桥梁检测技术研究的不断深入,无人机桥梁检测逐渐开始应用。以位于意大利拉奎拉工业中心的立交桥为例[6]。
该桥采用地面及无人机联合摄影方式采集桥梁损伤劣化信息,并通过基于无人机视觉的桥梁损伤捕捉与评估,表1为不同损伤的分类判定方法。

表1 缺陷分类
图3为无人机桥梁检测与人工检测对损伤的判定对比。
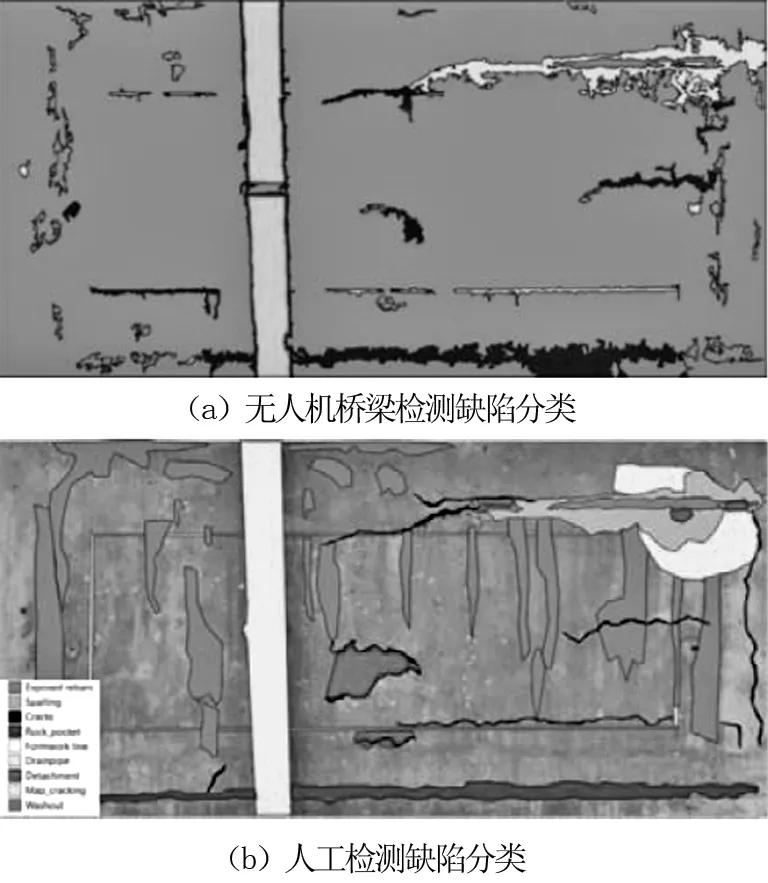
图3 不同检测方法的缺陷判定
通过两种方法对比发现,无人机桥梁检测能很好完成对混凝土露筋、剥落、裂缝的识别,与人工检测相比三者分别相差0.17%、0.03%、0.36%。相比与传统的人工检测,无人机桥梁检测优点[7]。
(1)无人机检测更加灵活,机动性能够更好地检测到人工无法到达的死角。
(2)无人机检测设备结构简单,维修与运输方便,综合成本远低于桥梁检测车。
(3)无人机检测操作简单、检测速度快、精度高,大大增加工作效率。
(4)无人机检测设备场地环境要求小,保证作业时的通车顺畅,不影响车辆通行。
(5)无人机代替检测人员进行高空作业,无人身安全隐患。
无人机视觉桥梁检测可应用在桥梁的经常性检测、定期检查与特殊检查。对于桥梁的经常性检查,可通过无人机帮助检测人员在保证安全性的同时,对桥梁进行全方位、高效率的检查,便于检测人员完成日常巡检,为桥梁的养护工作提供可靠性依据。对于桥梁的定期检查及特殊检查,可通过无人机对桥梁的结构损坏做前期的快速评估,再通过必要的检测设备对桥梁进行全面查看,提升检测工作的效率,降低检测成本。
3.3 无人机桥梁检测实际应用的不足
以沪渝高速四渡河大桥为例,该桥采用八旋翼无人机对桥梁混凝土及钢结构进行检测[8]。
通过对该工程实例的分析以及现有资料整理发现,无人机桥梁检测在实际工程中的应用目前仍然存在以下几点不足[9-11]。
(1)桥下定位抗干扰能力不足。无人机定位采用的是用全球卫星定位系统和惯性导航系统联合技术(GPS/INS组合制导),当无人机在桥下检测时,由于桥下遮挡以及钢筋网架产生的磁场,使得无人机信号受到干扰,导致无人机定位不准确。
(2)巡航时间短,受天气影响大。通过对无人机巡航的能源是通过搭载的锂电池组提供的。在遇到风雪天气时,理论上可通过提高气动功率抵消天气干扰,但受到锂电池能效的影响,无人机的巡航时间将大大缩短。
(3)狭小空间处的避障能力不足。沪渝高速四渡河大桥目前无人机主要是通过搭载在其上的全方位超声波传感器,测量无人机与周围构件的距离进行避障,但这类技术在狭小的空间测量误差仍无法满足要求。
为弥补无人机桥梁检测技术的不足,越来越多的学者研究其他自动化或半自动化检测设备进行辅助检测。目前,国内外学者研发了一系列自动化检测机器人,如磁轮式机器人、坦克式机器人、蜘蛛机器人等爬壁机器人,其检测原理与无人机检测技术相似。不同于无人机的运动方式,检测机器人主要是通过在内部装置永磁体或电磁铁使其吸附在桥梁上,实现在桥梁结构上的滑动与攀爬等运动,可在狭小空间内检测[12,13]。
基于无人机视觉系统的桥梁检测实现了对桥梁缺陷的自动化识别、分类与记录,使得无人机桥梁检测技术很好的解决了传统桥梁检测存在的检测效率低、费用高以及高空作业给检测人员带来的安全隐患等问题。但是,无人机桥梁检测技术还存在明显不足,无人机无法对桥梁的箱体等狭小的空间进行检测,并且受到天气的影响较大,定位的抗干扰能力较差,需要结合其他类型的检测机器人。随着桥梁检测设备的不段改进,无人机桥梁检测的使用性也将提升,其检测技术具有广阔的前景。
猜你喜欢桥梁检测“不等式”检测题中学生数理化·七年级数学人教版(2021年6期)2021-11-22“一元一次不等式”检测题中学生数理化·七年级数学人教版(2021年6期)2021-11-22“一元一次不等式组”检测题中学生数理化·七年级数学人教版(2021年6期)2021-11-22“几何图形”检测题中学生数理化·七年级数学人教版(2020年12期)2021-01-18“角”检测题中学生数理化·七年级数学人教版(2020年12期)2021-01-18手拉手 共搭爱的桥梁湖南教育·A版(2019年4期)2019-05-10句子也需要桥梁小学生学习指导(低年级)(2019年4期)2019-04-22加固技术创新,为桥梁健康保驾护航中国公路(2017年11期)2017-07-31无人机在桥梁检测中的应用中国公路(2017年10期)2017-07-21高性能砼在桥梁中的应用山东工业技术(2016年15期)2016-12-01