梁卫征 张瑞成 王晓爽 李鹏飞 孙伟良
华北理工大学电气工程学院 河北唐山 063210
最优控制理论主要研究使控制系统的性能指标实现最优化的基本条件和综合方法。其基本原理主要是贝尔曼(R.Richard Bellman)提出的动态规划和庞特里亚金等人提出的极小值原理,它是现代控制理论的重要组成部分,也是控制科学与工程学科硕士研究生的一门必修课程,该课程理论性强、综合程度较高,学生学习的难度较大。目前,在大多数的高校中,对这门课程的讲授仍以课堂教学为主和课下作业为辅的教学方式,学生学习兴趣差,学习效果不好。因此,选择合适的教学方法和手段是教师面临的主要任务。
杨自军指出高质量的教学案例建设是案例教学质量的保障,科学运用教学案例是提升案例教学效果的关键[1]。张西文等针对“岩土工程数值分析”课程精选了10个岩土工程典型工程问题,并进行教学案例库建设[2]。谭中标等针对“现代生物技术”课程,建设了包括理论综合、思维训练、实践操作等类型的教学案例,激发了学生的学习兴趣[3]。刘同海等围绕“农业物联网技术”课程教学目标和内容,开发了课堂理论教学+网络在线演示+现场操作等分阶段、多层次、重应用、动手操作的教学新模式[4]。高斌等为提高食品专业硕士学位研究生的食品安全事件的分析回应能力,以食品安全经典案例为切点,将案例教学法融入“食品安全案例”课程中[5]。
综上可知,为了激发学生的学习兴趣,提升教学效果,很多研究生课程都开发了教学案例,而最优控制的教学案例还比较少见。为此,根据课程教学目标与工程应用,开发了基于Matlab/Simulink的仿真教学案例。从控制原理、对象模型、仿真程序和仿真结果几方面入手,重点针对经典变分法、极小值原理、线性二次型控制等开发教学案例,构建了理论教学、仿真演示、实践操作的教学模式。
“最优控制”是控制科学与工程相关学科硕士研究生的一门学位课程。课程内容主要包含最优控制的变分法、极小值原理及其应用、动态规划、二次型目标函数的最优控制问题等。其中经典变分法、极小值原理和动态规划是“最优控制”课程的三大基石[6]。
经典变分法是研究对泛函求极值的一种数学方法,仅适用于控制变量的取值范围不受限制的情况。
极小值原理是基于分析力学中哈密顿方法的推广,它可用于控制变量受限制的情况,能给出所求问题中最优控制所满足的条件。它既适用于连续系统,也适用于离散系统求解。
动态规划是数学规划方法之一,同样适用于控制变量受限制的情况。它既适用于连续系统,也适用于离散系统求解,而且是非常适合于在计算机上进行计算的有效方法之一。
(一)基本思路
根据“最优控制”课程的体系结构,结合科学研究将工程应用引入进来,重点开发经典变分法、极小值原理、状态调节器和跟踪问题几个典型的教学案例。下面对几个典型案例所研究的对象数学模型进行简单概述,其控制的基本原理参见文献[6],仿真程序和结果将在下一小节论述。
(二)教学案例构建
1.经典变分法教学案例
设一艘轮船驶经一水流区域。水流方向为已知的位置函数:
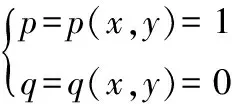
(1)
式中x和y为直角坐标;
p和q分别是水流在x和y方向的速度分量;
V是轮船相对水的速度,为一常数。试问怎样驾驶轮船,使船以最短时间从起点(0,0)驶至终点(10,20)?
轮船运动微分方程可写为
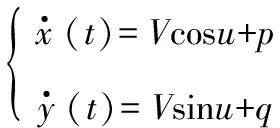
(2)
式中u为轮机驾驶方向与x轴之间的航向角,为控制变量,其值不受约束。
性能指标取为:

(3)
轮船相对水的速度V取为3m/s。
2.极小值原理教学案例
以集装箱起重机的水平行走轨道为横坐标,与轨道垂直的方向为纵坐标。设初始位置为(9.5,0),终点为(0,0),动力加速度|u(t)|≤0.75,阻力加速为0.1,若运行速度达到最大限制速度2m/s时,货物以最大运行速度进行匀速运动,然后再进行减速。
则起升机构的运动微分方程为[7]:
(4)
性能指标为:
(5)
3.状态调节器教学案例
二阶倒立摆结构如图1所示,s为小车偏离平衡位置的位移,l1为下摆质心到轴心的距离,l2为上摆质心到轴心的距离,θ1为下摆角,θ2为上摆角。
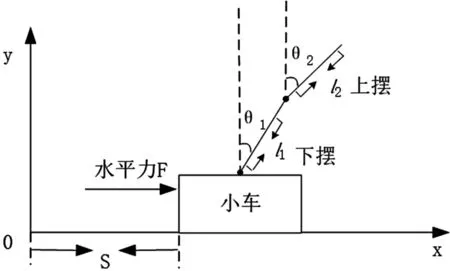
图1 二阶倒立摆系统
令:
x=[x1x2x3x4x5x6]T
则系统的状态方程为:
(6)
(7)
4.跟踪问题教学案例
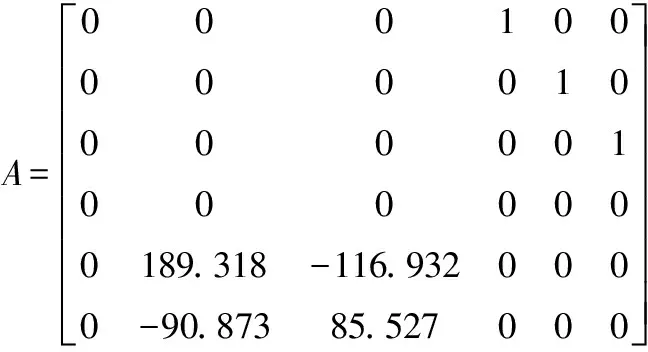
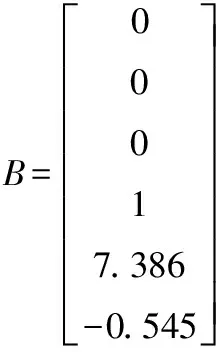
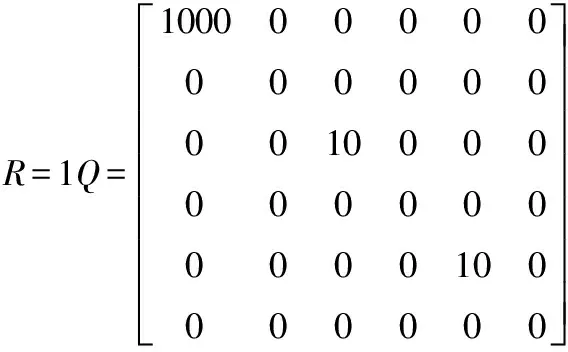
轧机主传动系统力学模型可以等效为图2所示的两惯性质量—弹簧系统:其中Jm、JL分别为电机和负载端的转动惯量,Tm、TL、Tsh分别为电机力矩、负载阻力矩和弹性轴扭转力矩,Ksh为弹性轴刚度系数,ωm、ωL为电机和负载的角速度。
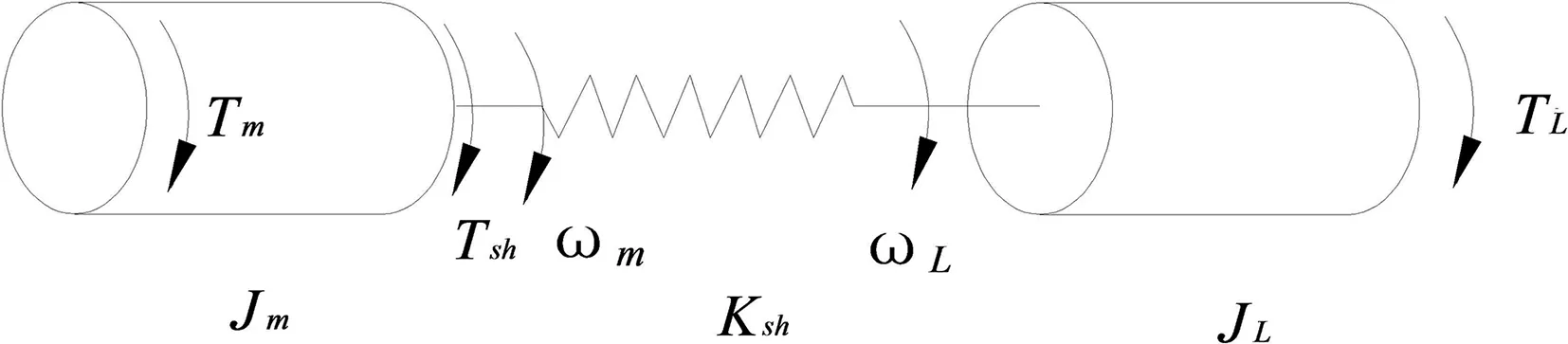
图2 轧机主传动系统模型图

(8)
(9)
性能指标取为:
(10)
其中:
Jm=1552kg·m2,JL=1542kg·m2,
Ksh=5.93×106N·m·rad-1,Q=1,R=1
基于Matlab软件平台,将上述工程应用开发为“最优控制”课程典型教学案例,主界面如图3所示,点击启动按钮进入教学案例仿真界面。每个案例包括模型建立、控制原理展示、程序编制和仿真结果展示几部分。下面以轧机主传动速度跟踪系统为例,介绍其基本运行过程。

图3 系统运行主界面
图4为跟踪问题控制的基本原理,图5为跟踪控制问题的Matlab仿真程序,图6为给定跟踪速度为27.3rad/s控制效果。
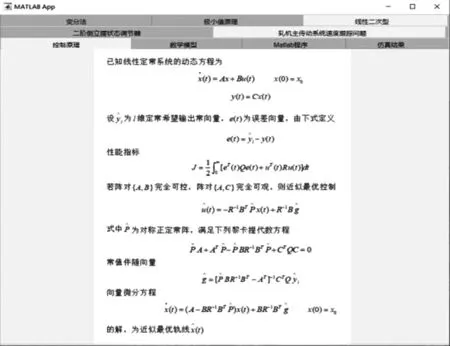
图4 跟踪问题控制原理
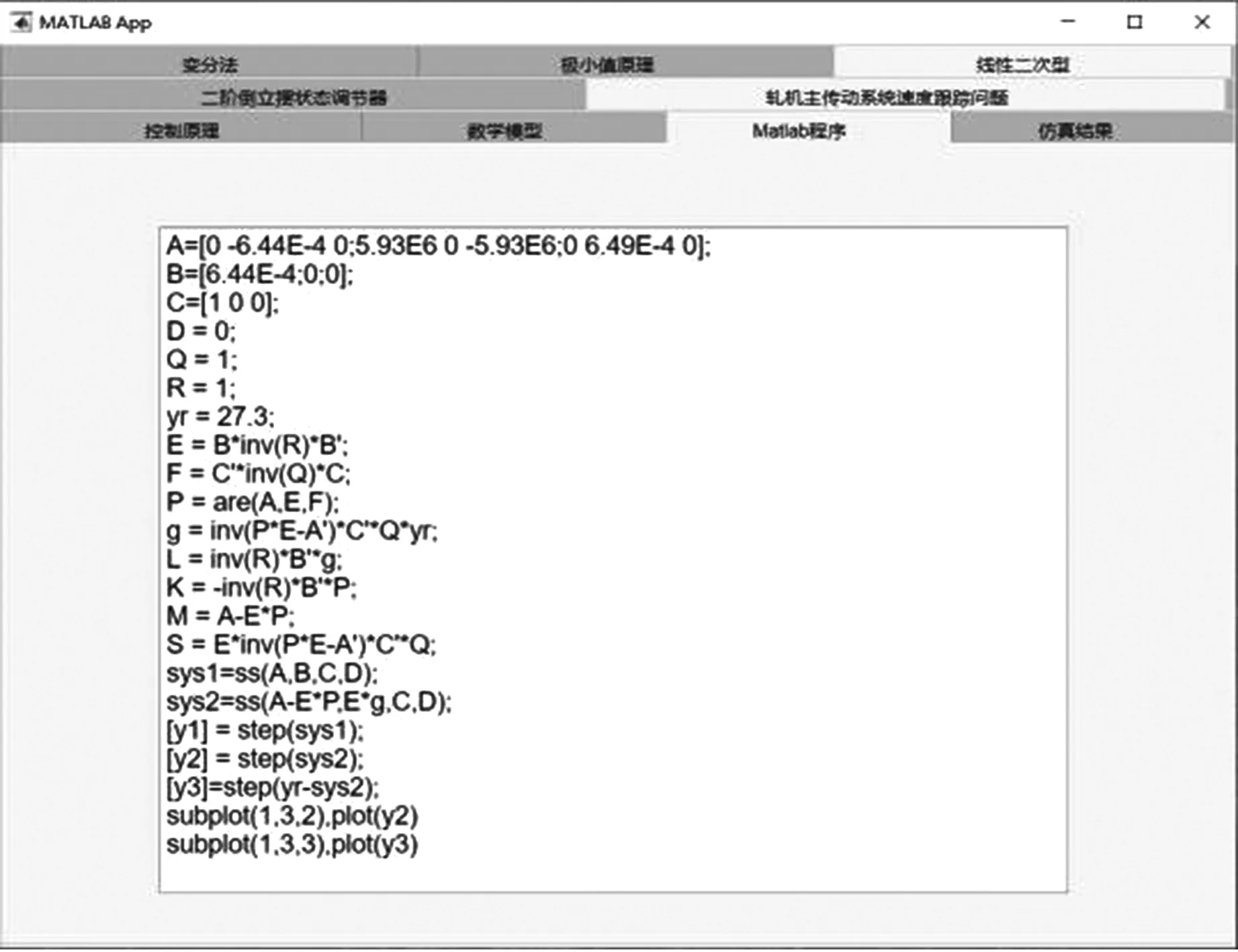
图5 Matlab仿真程序
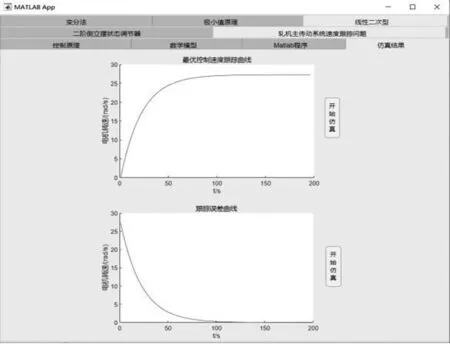
图6 系统运行仿真曲线
针对经典变分法、极小值原理、状态调节器和跟踪问题,结合工程实际并利用Matlab开发了“最优控制”课程教学案例,使学生对最优控制的几种典型方法从控制原理、对象模型、仿真程序和仿真结果等几方面都能够进行深入了解,将理论与实际更好地进行了结合,提高了学生的学习兴趣、分析问题和解决问题的能力,增加了教学过程的交互性、启发性与创新性。
猜你喜欢极小值最优控制原理条件平均场随机微分方程的最优控制问题数学年刊A辑(中文版)(2021年1期)2021-06-09了解咳嗽祛痰原理,有效维护健康保健医苑(2020年1期)2020-07-27一道抽象函数题的解法思考与改编*中学数学研究(江西)(2020年5期)2020-07-03构造可导解析函数常见类型例析*中学数学研究(江西)(2019年11期)2019-12-31带跳跃平均场倒向随机微分方程的线性二次最优控制数学物理学报(2019年3期)2019-07-23平均场正倒向随机控制系统的最大值原理数学物理学报(2019年1期)2019-03-21Timoshenko梁的边界最优控制数学物理学报(2018年3期)2018-07-17极小值原理及应用科技风(2018年19期)2018-05-14化学反应原理全解读中学生数理化(高中版.高二数学)(2017年1期)2017-04-16基于庞特里亚金极小值原理的多运载体有限时间编队控制自动化学报(2017年1期)2017-03-11